Krawleb-Plot
This week, I wanted to work on implementing new techniques or processes that I had never tried before, and find something interesting in these processes that emerged from exploration rather than going in with a set vision.
The two concepts I wanted to explore were voronoi diagrams and polar coordinates, neither were very complex alone, but I’ve never really with either and wanted to see what happened when they were combined.
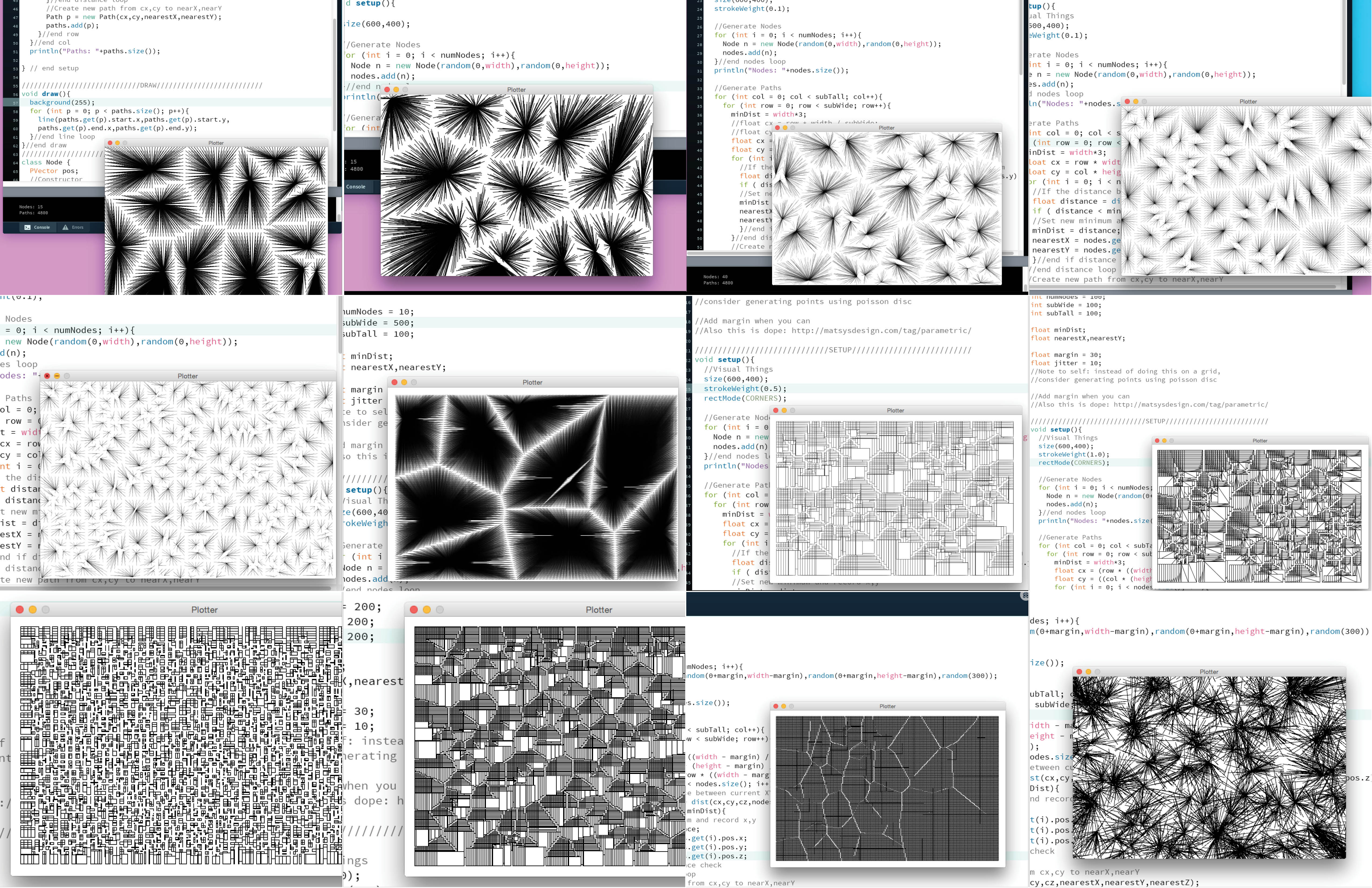
I began by implementing a very ‘naive’ voronoi diagram which just jumped a set X and Y position, and drew a line to the nearest node, which were placed randomly across the canvas.
From here I explored number of nodes, number of subdivisions (lines), drawing rectangles instead of lines, then moved into 3D, voronoi in 3D rectangular space, cubes, lines, rectangles, etc.
Here is a collection of screenshots of the experiments and iteration as I went along:
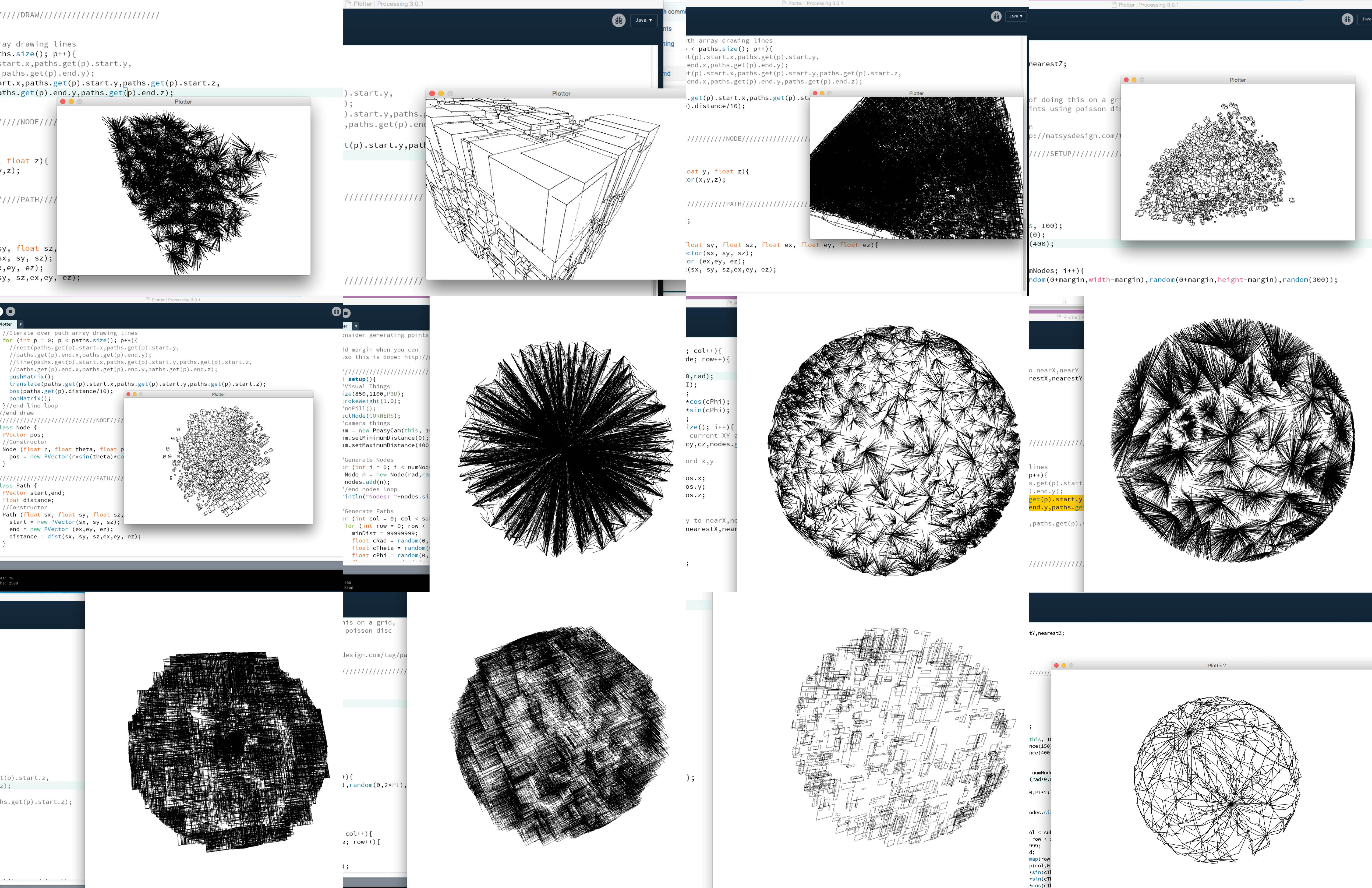
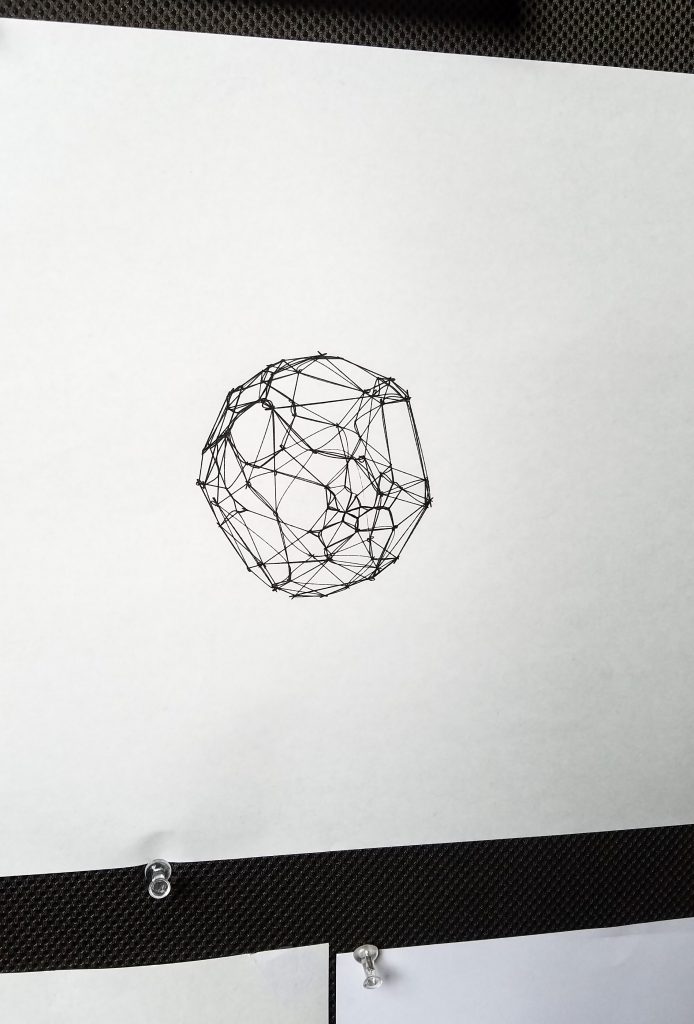
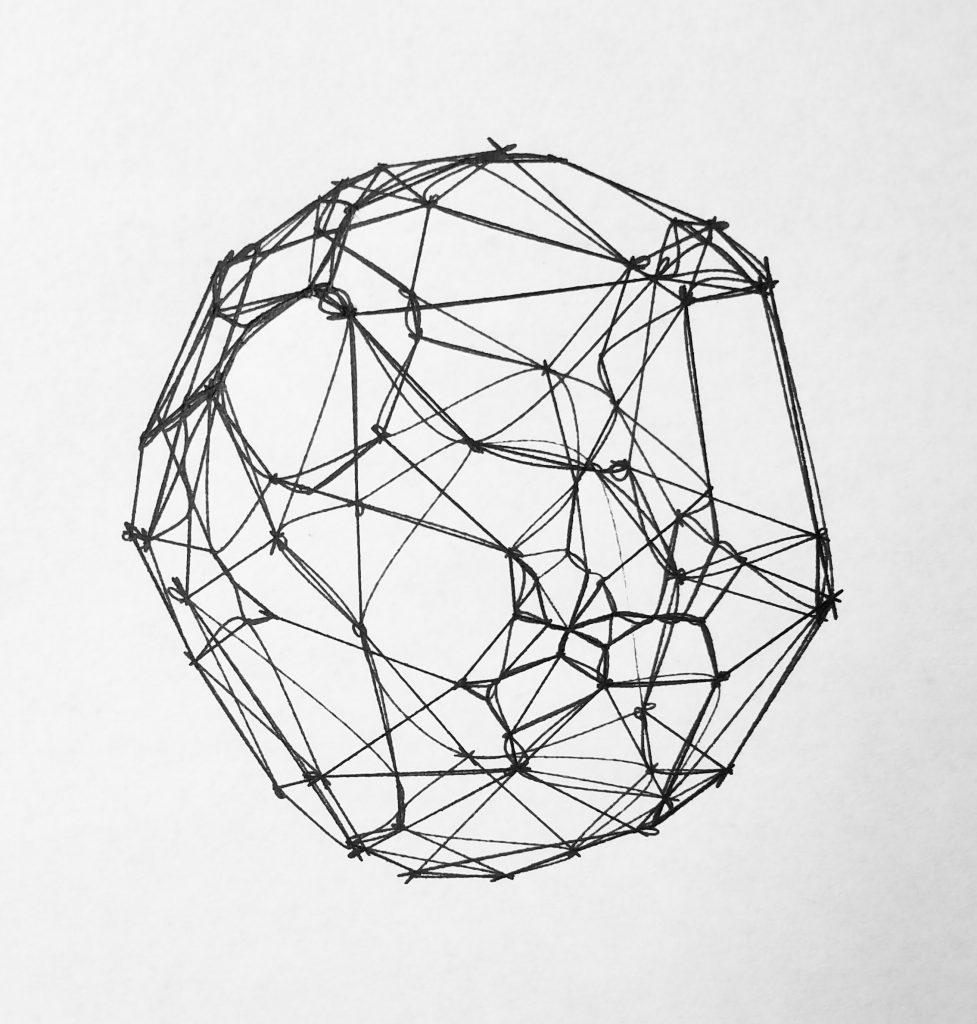
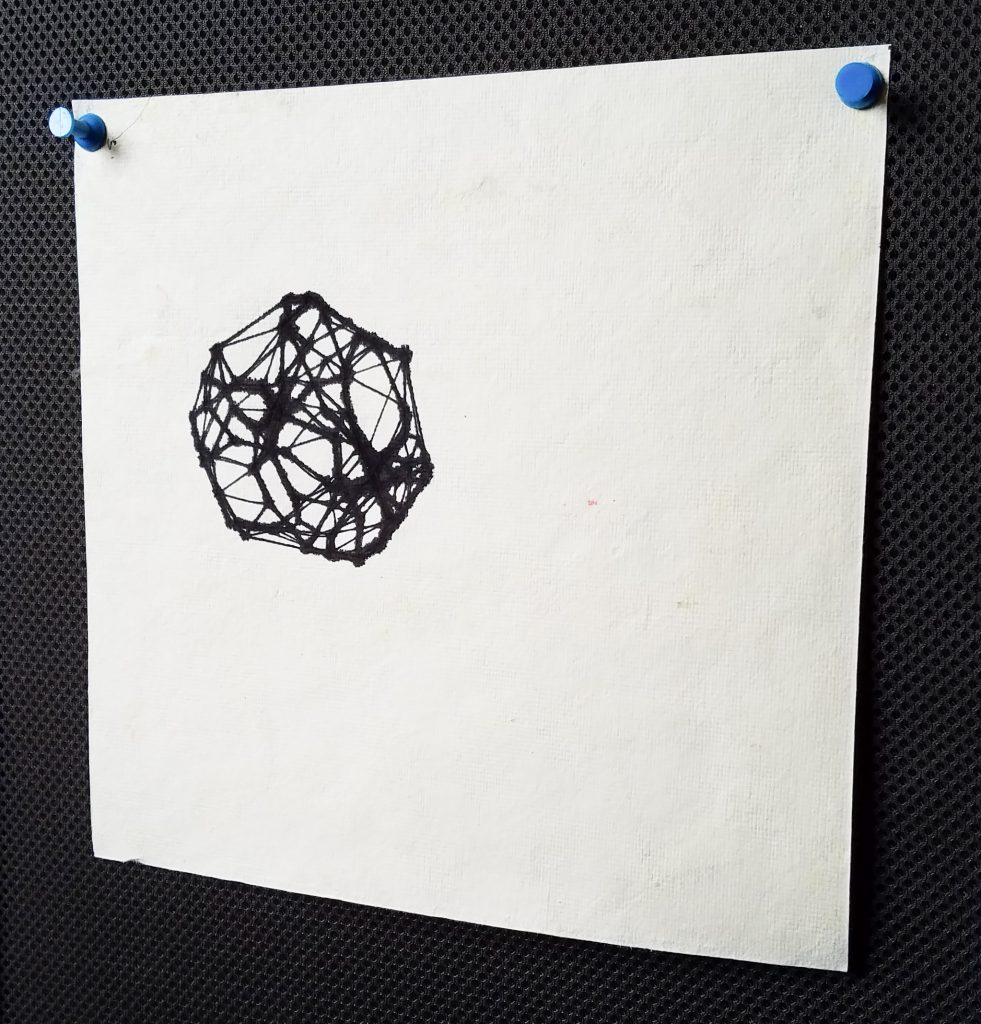
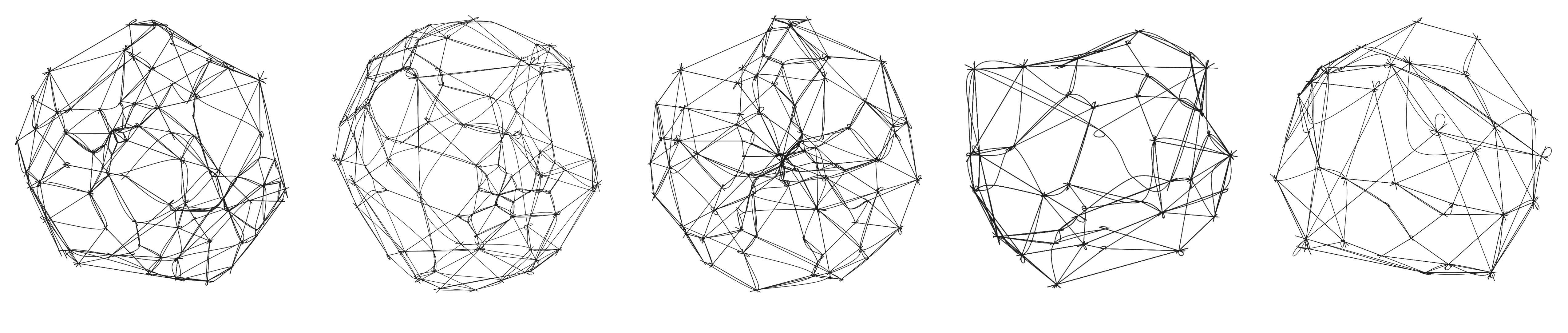
Just after these screenshots, I explored the idea of only plotting the ‘end’ of the voronoi lines, which is where the nodes are located on the outside of a sphere, and then adding a variation in sphere radius using a noise function, then connecting them using a single curve interpolated between the points. The result was the thin and wire-sculpture structures that I ultimately decided to plot.
I liked the results because I thought they struck an interesting balance between computational and hand-drawn, where there’s a sense of geometry and space, but the lines are wavering and ambiguous, looking as if they could have been hand drawn:
Code here:
import peasy.*;
import peasy.org.apache.commons.math.*;
import peasy.org.apache.commons.math.geometry.*;
import peasy.test.*;
import processing.pdf.*;
PeasyCam cam;
boolean savePDF;
//Array of Node objects, where paths are drawn to.
ArrayList nodes = new ArrayList();
//Array of Path objects, which holds paths to be drawn.
ArrayList paths = new ArrayList();
int numNodes = 100;
int subWide = 60;
int subTall = 60;
float minDist;
float nearestX,nearestY,nearestZ;
float margin = 30;
float jitter = 10;
float rad = 100;
float ns = 0.2;
/////////////////////////////SETUP//////////////////////////
void setup(){
//Visual Things
size(900,600,P3D);
pixelDensity(2);
stroke(30);
strokeWeight(0.7);
noFill();
rectMode(CORNERS);
ellipseMode(CENTER);
//camera things
cam = new PeasyCam(this, 100);
cam.setMinimumDistance(150);
cam.setMaximumDistance(400);
//Generate Nodes
for (int i = 0; i < numNodes; i++){
Node n = new Node(map(noise(i*ns),0,1,0,rad),
random(0,2*PI),
map(i,0,numNodes,0,PI*2));
nodes.add(n);
}//end nodes loop
println("Nodes: "+nodes.size());
//Generate Paths
for (int col = 0; col < subWide; col++){
for (int row = 0; row < subTall; row++){
minDist = 99999999;
float cRad = rad;
float cTheta = map(row,0,subWide,0,PI*2);
float cPhi = map(col,0,subTall,0,PI*2);
float cx = cRad*sin(cTheta)*cos(cPhi);
float cy = cRad*sin(cTheta)*sin(cPhi);
float cz = cRad*cos(cTheta);
for (int i = 0; i < nodes.size(); i++){
//If the distance between current XY and Node XY is new minimum
float distance = dist(cx,cy,cz,nodes.get(i).pos.x,nodes.get(i).pos.y,nodes.get(i).pos.z);
if ( distance < minDist){
//Set new minimum and record x,y
minDist = distance;
nearestX = nodes.get(i).pos.x;
nearestY = nodes.get(i).pos.y;
nearestZ = nodes.get(i).pos.z;
}//end if distance check
}//end distance loop
//Create new path from cx,cy to nearX,nearY
Path p = new Path(cx,cy,cz,nearestX,nearestY,nearestZ);
paths.add(p);
}//end row
}//end col
println("Paths: "+paths.size());
} // end setup
/////////////////////////////DRAW//////////////////////////
void draw(){
background(255);
if (savePDF == true){
beginRaw(PDF, "export.pdf");
}
beginShape();
//Iterate over path array drawing lines
for (int p = 0; p < paths.size(); p++){
//curveVertex(paths.get(p).start.x,paths.get(p).start.y,paths.get(p).start.z);
curveVertex(paths.get(p).end.x,paths.get(p).end.y,paths.get(p).end.z);
}//end line loop
endShape();
if (savePDF == true){
endRaw();
savePDF = false;
}
}//end draw
/////////////////////////////KEYPRESSED//////////////////////////
void keyPressed() { if (key == 'p') { savePDF = true; }
}//end keypressed
/////////////////////////////NODE//////////////////////////
class Node {
PVector pos;
//Constructor
Node (float r, float theta, float phi){
pos = new PVector(r*sin(theta)*cos(phi),r*sin(theta)*sin(phi),r*cos(theta));
}
}//end node class
/////////////////////////////PATH//////////////////////////
class Path {
PVector start,end;
float distance;
//Constructor
Path (float sx, float sy, float sz, float ex, float ey, float ez){
start = new PVector(sx, sy, sz);
end = new PVector (ex,ey, ez);
distance = dist(sx, sy, sz,ex,ey, ez);
}
}//end path class