Final Project- Follower Robot

My project is a robotic 1/10th scale car that follows specific colors and items. For this project, I purchased a superman cape with hopes of making this into a cool interactive project that can be put out in a public space and people can try running away from the robot. However due to technical difficulties and many issues, i’ve only been able to get my project working to a certain degree.


The Technology
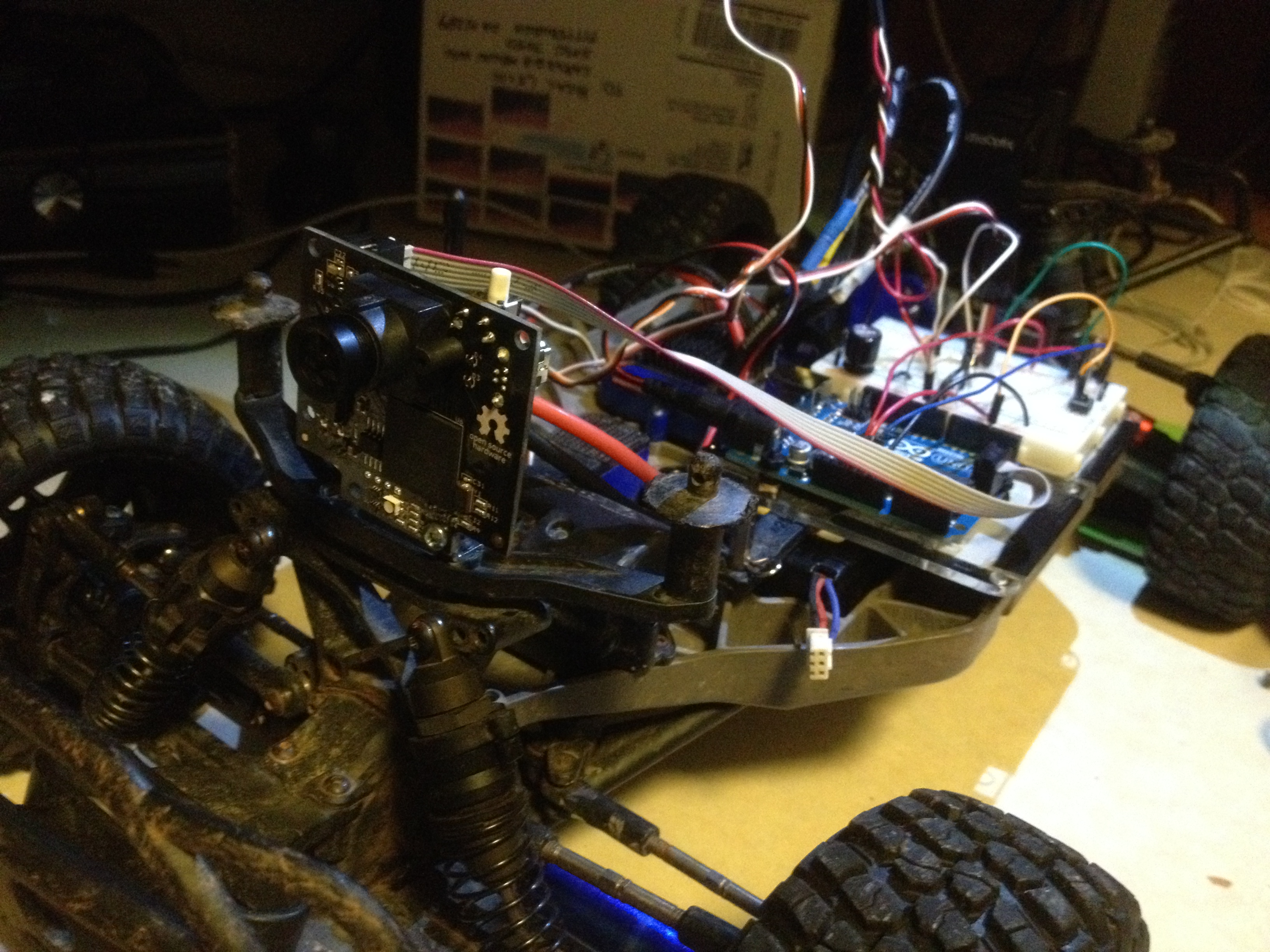
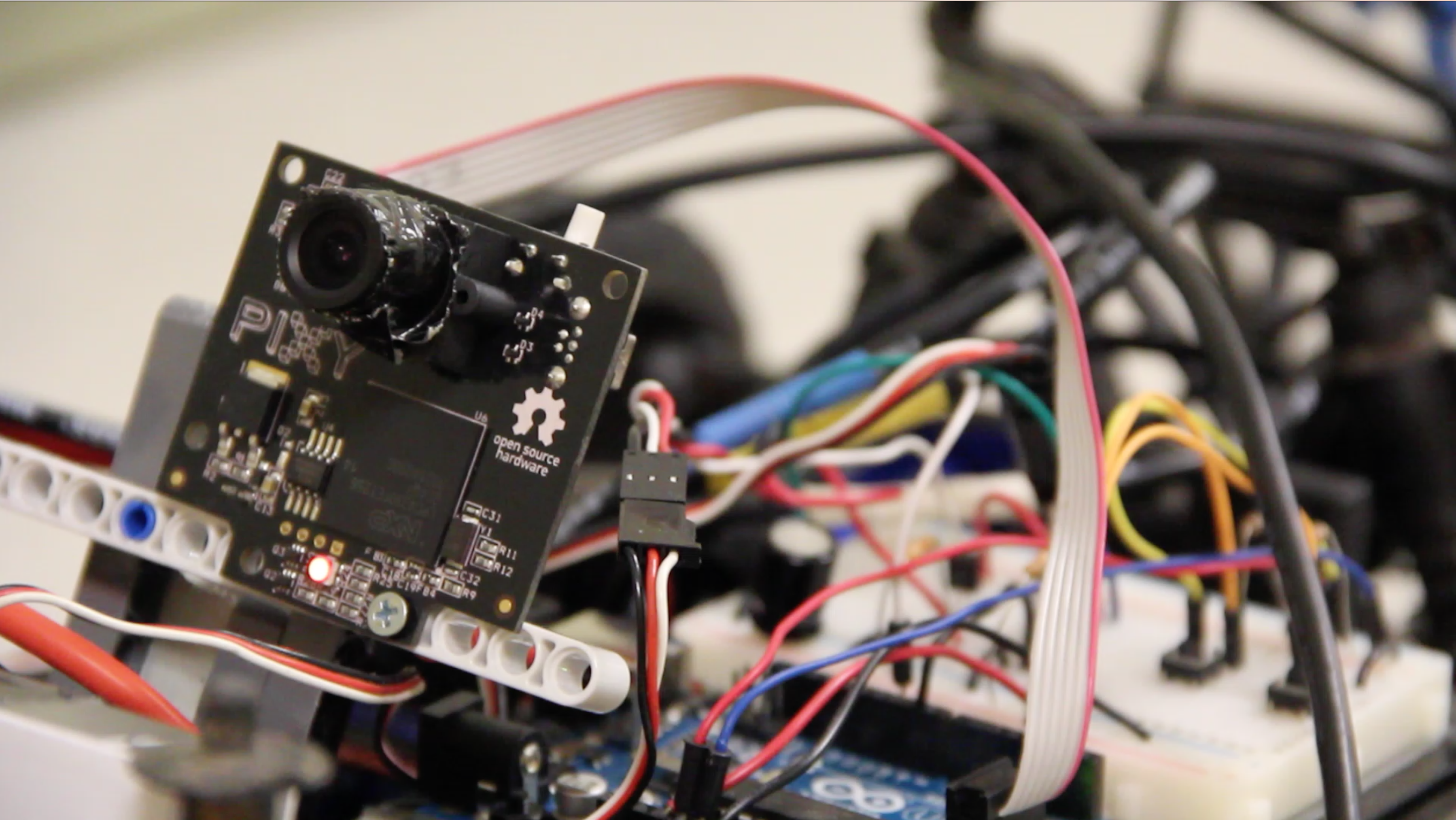
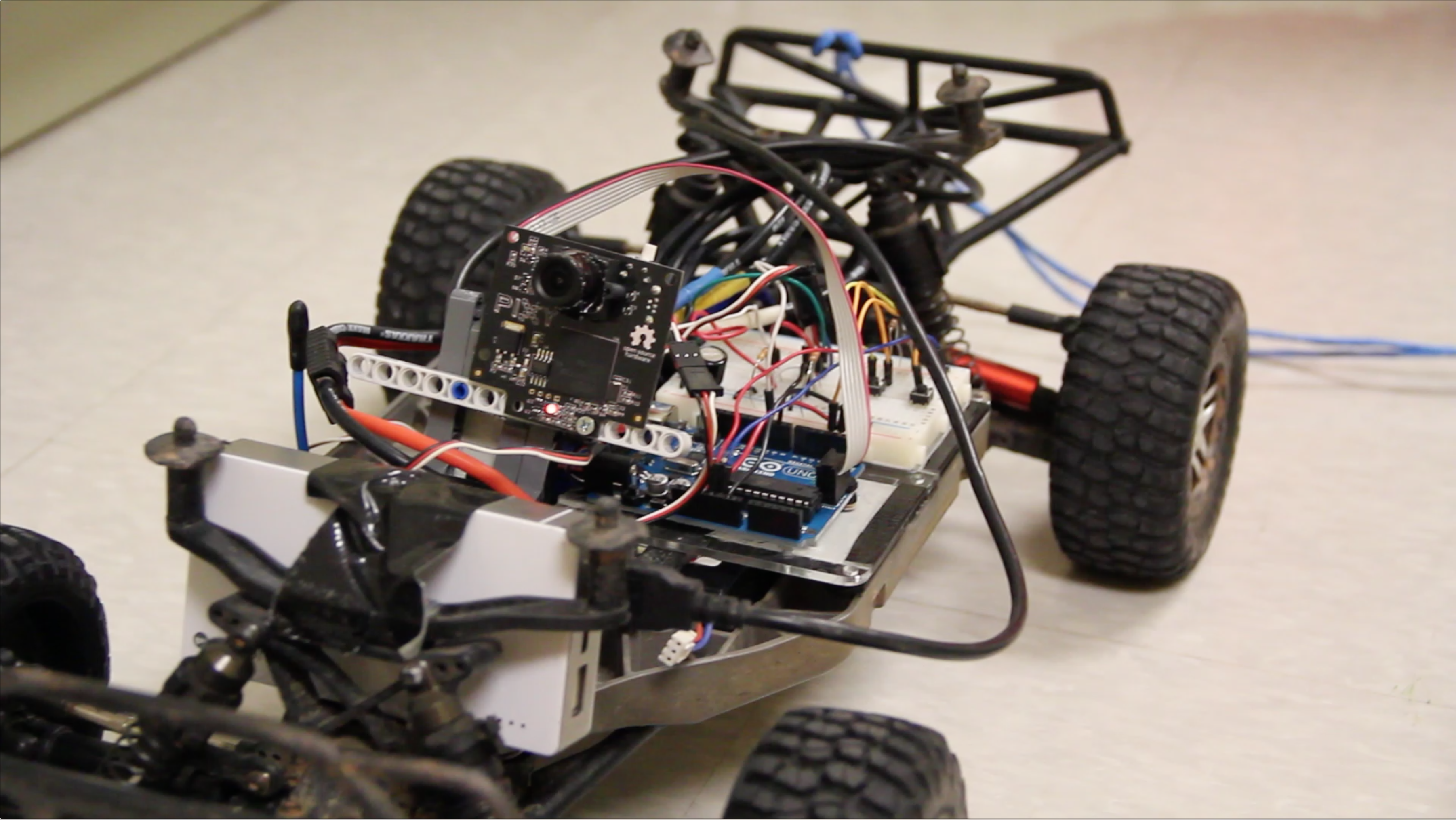
My project consists of three main parts- an Arduino to control everything, an RC car base and electronics (motor, servo, etc) and a Pixy camera (specialized camera developed by CMULabs and built for Arduino, available at ).
The pixy cam follows the red cape, and the Arduino measures the distance based on the size of the cape. This is slightly problematic as the person wearing the cape runs faster and the cape flaps around, changing sizes.
Diagram
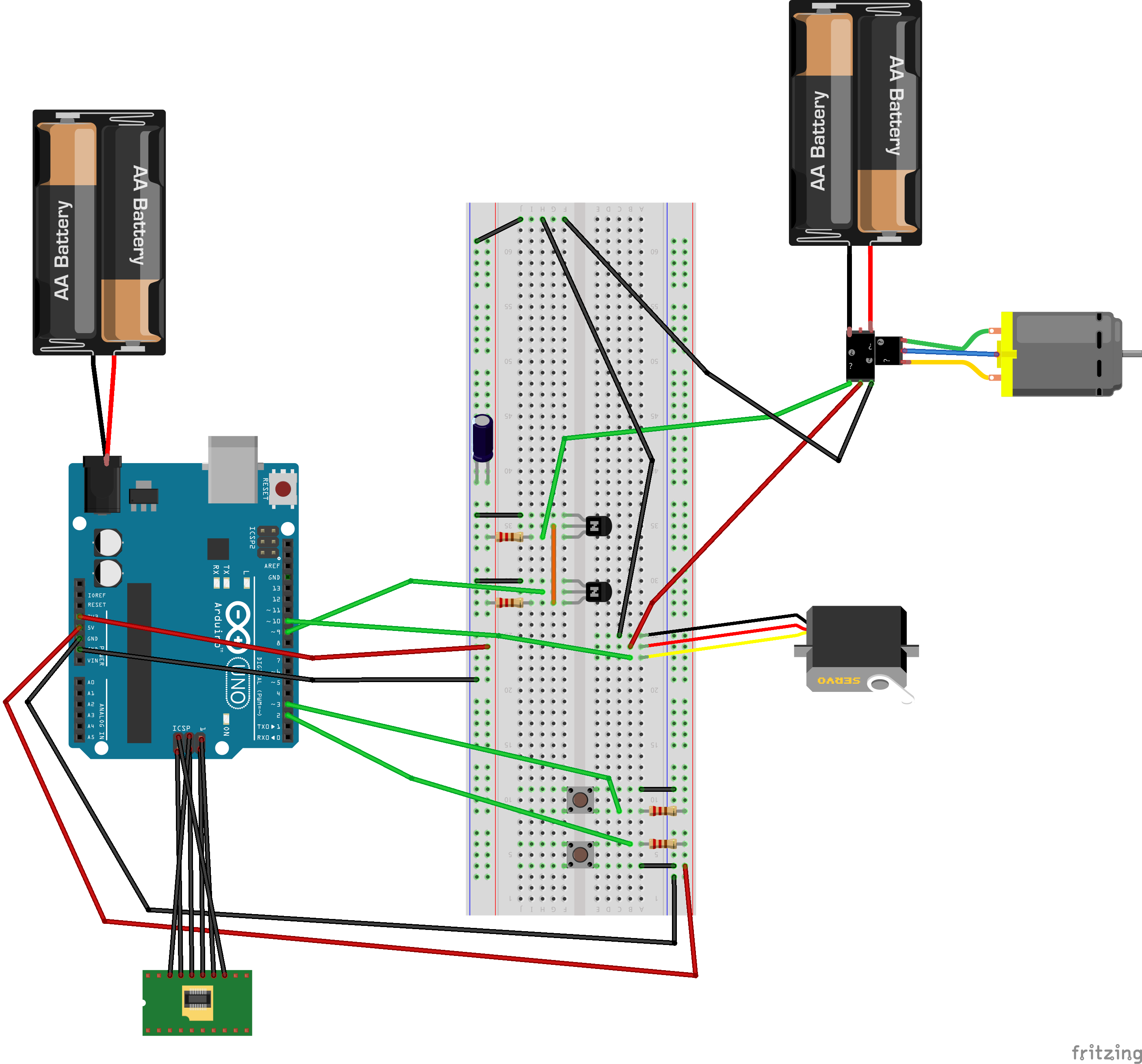
Below is the Fritzing Diagram for the breadboard controlling my robot. Signals are being sent from the arduino to the servo for steering and the ESC on my car for the motor speeds. The servo is powered by the ESC rather than the Arduino because the ESC outputs more voltage. The arduino recieves power from a standard power source, but the ESC on the robot is powered by a two cell LiPo battery. The two buttons control the base-size of the cape (resets distance) and the power (pressing the power starts the robot, and press again to pause it, stopping all servo and motor use).
Code
// SETUP
// Call Pixy and Servo
#include
#include
Pixy pixy;
#include
//Initialize Variables and objects
Servo motor;
Servo servo;
int width = 319;
int height = 199;
int speed = 90;
int dir = 90;
int sizeMIN = 8000;
int sizeMAX = 11000;
int sizeSetPin = 3;
int stopPin = 2;
boolean STOP = true;
int lastSize;
int refresh = 5;
int refreshSpeed = 50;
int sizes[50];
void setup()
{
delay(1000);
Serial.begin(9600);
Serial.println("Starting program...\n");
Serial.print("Initializing Pixy...\t\t");
pixy.init();
Serial.print("Successful\n");
Serial.print("Mounting Servos...\t\t");
motor.attach(9);
servo.attach(10);
Serial.print("Succesful\n");
Serial.print("Calibrating ESC...\t\t");
motor.write(speed);
delay(2000);
Serial.print("Succesful\n");
Serial.print("Setting Servo... \t\t");
servo.write(90);
Serial.print("Successful\n");
Serial.println("\n\n Standing By...");
pinMode(sizeSetPin, INPUT);
pinMode(stopPin, INPUT);
resetArray();
}
void loop()
{
if (digitalRead(sizeSetPin) == LOW) {
sizeMIN = lastSize-1500;
sizeMAX = lastSize+1500;
Serial.print("New ideal size: ");
Serial.print(sizeMIN);
Serial.print(" - ");
Serial.print(sizeMAX);
Serial.println();
delay(1000);
}
if (digitalRead(sizeSetPin) == LOW) {
Serial.println("size");
delay(1000);
}
if (digitalRead(stopPin) == LOW) {
if (!STOP) {
STOP = true;
speed = 90;
Serial.println("Program Halted.");
}
else {
STOP = false;
Serial.println("Program Resumed.");
delay(2000);
motor.write(102);
delay(2000);
}
delay(1000);
}
static int i = 0;
int j;
uint16_t blocks;
char buf[32];
int size = 500;
int largest;
blocks = pixy.getBlocks();
if (blocks)
{
i++;
if (i%refresh==0)
{
for (j=0; j size) {
size = cur_size;
largest = j;
}
}
if (size> 500) {
lastSize = size;
// Serial.print("Size (");
// Serial.print(size);
// Serial.print(")\t\t");
if (i%refreshSpeed==0) {
int total=0;
int sum=0;
int aveSize;
for (int i=0; i<50; i++) {
if (sizes[i] != 0) {
sum = sum + sizes[i];
sum = sum/2;
}
}
aveSize = sum;
//Change speed
Serial.print("Speed (");
Serial.print(speed);
Serial.print(")");
Serial.println();
if (!STOP) {
Serial.print("* ");
Serial.print(aveSize);
Serial.print(" *");
// checkSpeed(aveSize);
}
speed = 107;
resetArray();
}
//change direction
//Serial.print("\tDir (");
//Serial.print(dir);
//Serial.print(")");
checkDir(pixy.blocks[largest].x+(pixy.blocks[largest].width/2));
Serial.println();
for(int i=0; i<50; i++) {
if (sizes[i] == 0) {
sizes[i] = size;
break;
}
}
}
}
if (!STOP) {
//write servo and motor
motor.write(speed);
servo.write(dir);
}
else if (STOP) {
speed = 90;
dir = 90;
servo.write(dir);
motor.write(speed);
}
}
else {
//motor.write(90);
}
}
void resetArray() {
for (int i=0; i<50; i++) {
sizes[i] = 0;
}
}
void checkSpeed(int size) {
if (size< =sizeMAX && size>=sizeMIN){
Serial.print("\t-\t");
}
if (size< =sizeMIN) {
increaseSpeed();
}
if (size>=sizeMAX) {
reduceSpeed();
}
}
void reduceSpeed() {
Serial.print("\tv\t");
if (speed > 90){
speed-=10;
if (speed <90){
speed = 90;
}
}
else if (speed>=40) {
speed -=3;
}
}
void increaseSpeed(){
Serial.print("\t^\t");
if (speed>=90 && speed < = 94) {
motor.write(102);
delay(2000);
speed = 95;
}
else if (speed >= 115 && speed < = 120) { // MAX 140
speed += 1;
}
else if (speed < 90) {
speed = 90;
}
else if (speed < 115){
speed +=2;
}
}
void checkDir(int x) {
if (x < 165) {
//Serial.print("\t<\t");
dir = map(x, 20, 165, 0, 90);
dir = constrain(dir, 0, 90);
}
else if (x>235) {
// Serial.print("\t>\t");
dir = map(x, 235, 320, 90, 180);
dir = constrain(dir, 90, 180);
}
else {
// Serial.print("\t-\t");
dir = 90;
}
}